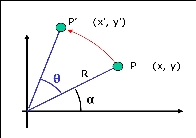
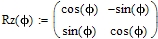
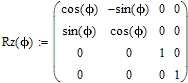
La matriz de rotación 2D en el eje Z:
En la figura, suponga una posición de P:
Se desea rotar P al siguiente valor de θ:
Simplemente Q es la transformación de P:
Usando matrices homogéneas en 2D
Redefiniendo la ecuación de rotación:
Simplemente Q es la transformación de P:
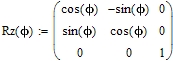
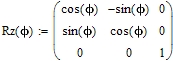
Redefiniendo la matriz de rotación 3D en el eje Z:
P entonces tiene componente en Z:
Simplemente Q es la transformación de P:
Usando matrices homogéneas en 3D
Redefiniendo la ecuación de rotación:
Simplemente Q es la transformación de P:
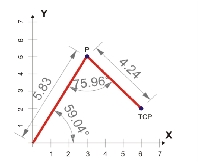
Finalmente, ejemplo de cinemática directa de un robot 2D
Resolver el robot 2D de la figura.
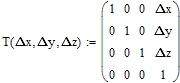
La matriz de traslación en XYZ es:
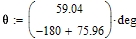
Los valores de las longitudes pueden expresarse en un arreglo de constantes L. Las variables de entrada son los valores angulares del arreglo θ:
El punto intermedio P es la rotación+traslación #0.
El cálculo de TCP simplemente involucra rotación+traslación #0 y #1.
El TCP es la última columna de la matriz resultado.