| Coordinador
Académico Maestría en Ingeniería
Orientación en Mecatrónica: Daniel Ramírez Villarreal
|
|
NOTAS
|
|
Información del curso
|
- Clave y nombre de la Unidad de Aprendizaje: MIMOAV002 Robótica
- Frecuencia Semanal: 4 horas de trabajo presencial
- Horas de trabajo extra aula por semana: 7h15
- Modalidad:: Escolarizada
- Periodo académico:Tetramestral
- LGAC: Integración de sistemas y/o procesos mecatrónicos, Concepción de sistemas y/o
procesos mecatrónicos
- Ubicación tetramestral: 3
- Área Curricular: Avanzada
- Créditos: 6
- Requisito: Actuadores y transductores, Básica optativa
- Fecha de elaboración: 14/11/2013
- Fecha de la última actualización: 14/11/2013
- Responsable (es) del diseño: Dra. Beatriz Cristina López Walle
- Perfil de egreso vinculado a la Unidad de Aprendizaje:
- Proponer proyectos de ingeniería mecatrónica.
- Analizar, interpretar y generar soluciones a los problemas de la Industria que afectan
a la empresa en el entorno de la integración de istemas mecatrónicos con un sentido ético, a través de la autocrítica, la creatividad y la disciplina.
- Competencias generales a que se vincula la Unidad de Aprendizaje:
- Competencia 7 / Evidencia: problemario
Elabora propuestas académicas y profesionales inter, multi y transdisciplinarias
de acuerdo a las mejores prácticas mundiales para fomentar y consolidar el
trabajo colaborativo.
- Competencia 12 / Evidencia: examen
Construye propuestas innovadoras basadas en la comprensión holística de la
realidad para contribuir a superar los retos del ambiente global interdependiente.
- Competencias específicas y nivel de dominio a que se vincula la unidad de aprendizaje:
- CEIMO2 Integrar o
concebir de
manera sinérgica
sistemas y/o
procesos
mecánicos,
electrónicos y de
control con el fin
de optimizarlos de
acuerdo a sus
necesidades
sociales,
tecnológicas y
económicas.
- Nivel I
inicial: Comprende
los
principios de
la ingeniería
mecatrónica.
- Evidencia: Portafolio
de
actividades
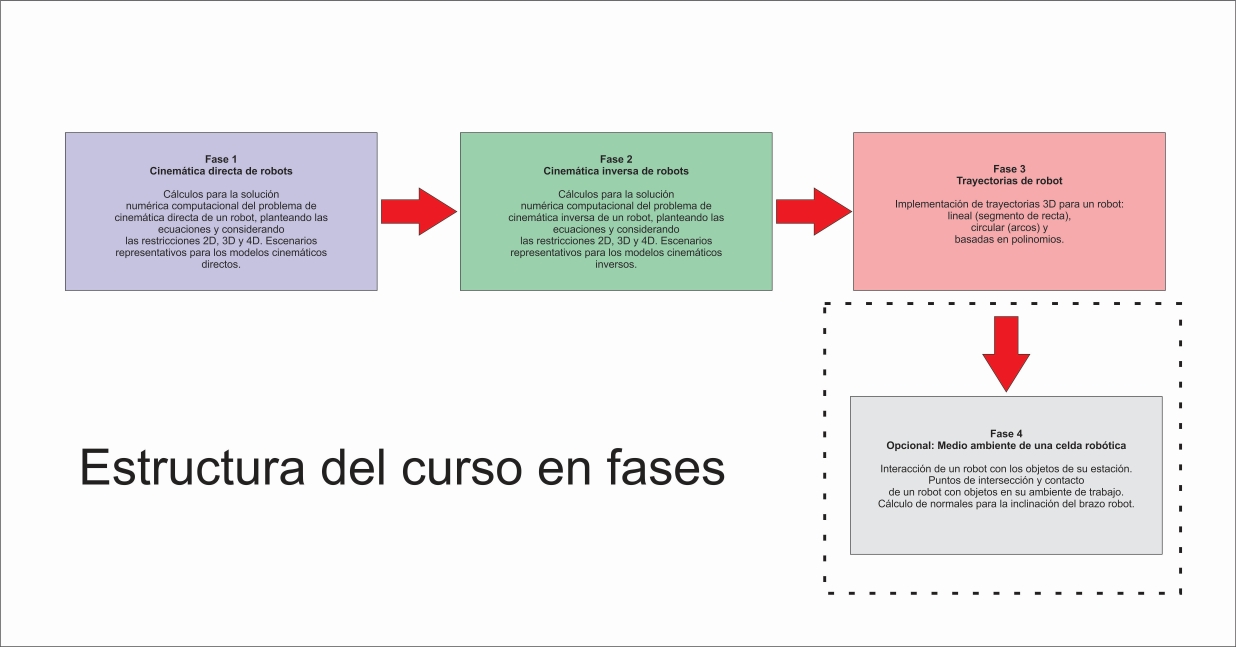
- Contenido de la Unidad:
- Clasificación de robots
- Diseño de trayectorias
- Programación y comunicación de robots
- Producto integrador de aprendizaje:
- Fuentes de apoyo y consulta:
- Theory of Applied Robotics: Kinematics, Dynamics, and Control (2nd Edition). Reza N.
Jazar (2010). Springer.
- Robotics: Modelling, Planning and Control. Bruno Siciliano, Lorenzo Sciavicco, Luigi Villani
and Giuseppe Oriolo (2011). Springer.
- Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Peter I. Corke (2011).
Springer.
|
Normativa docente (PDF)
|
|
Metodología de Evaluación
|
- Portafolio de evidencias con las actividades fundamentales: 40%
- Examen medio curso y examen ordinario: 30%
- Producto Integrador de Aprendizaje 30% desglosado como sigue:
Tema: Los cuaterniones como herramienta para el análisis de la cadena cinemática de un robot industrial.
Descripción: Los cuaterniones son números hipercomplejos de 4 componentes. En últimos años han crecido notablemente la cantidad de implementaciones de cuaterniones en diversas disciplinas atraídas por notables ventajas relacionadas con la simplicidad, eficiencia y características algebraicas. La cinemática del manipulador industrial trata del estudio analítico del movimiento del robot con respecto a un sistema de coordenadas de referencia fijo. Toda cadena cinemática abierta responde a un modelo cinemático mediante el cual se modela la relación entre sus variables. En la actualidad existen diferentes métodos para resolver la cinemática de los brazos robóticos. Esta propuesta de trabajo considera el uso de la herramienta computacional basada en números complejos que permite modelar un robot en relativamente poco tiempo y esfuerzo. Este trabajo detalla su uso en robótica para representar rotaciones y compara los cálculos con el método de rotaciones de matrices tradicionalmente usado para este fin.
Objetivos: Modelar/adaptar un robot industrial (las geometrías en crudo podrán descargarse de internet si están a disposición) en el ambiente 3D RoKiSim utilizando su cadena cinemática y documentar sus propiedades matemáticas básicas utilizando cuaterniones
(números complejos).
Como información complementaria deberá generarse animaciones de los cálculos vectoriales del robot. Como referencia véase "Accurate Computation of Quaternions from Rotation Matrices" (link) (Desmos) (link)

Entregables:
En el exámen de medio término. Exposición Powerpoint del proceso de cálculo de rotaciones con números complejos.
- Exposición Powerpoint del cálculo cinemático y su comprobación (20 mins. todos los integrantes). (10%)
- Reporte técnico del proceso de elaboración: documento de word de cuando menos diez páginas explicando a detalle los aspectos del trabajo, con texto explicativo de los entregables y gráficas de pantalla. (25%)
- Hoja de MathCAD explicativa a cerca de las transformaciones y ecuaciones del robot en cinemática directa utilizando cuaterniones, así como los valores numéricos para diferentes posiciones. (25%)
- 5 posiciones HD del robot demostrando los valores numéricos calculados con cuaterniones contra (1) los de la simulación RoKiSim así como el resultado de (2) las ecuaciones usando transformaciones. (40%)
Rúbrica:
Para que el PIA pueda acreditar calificación, el robot de cada equipo (o estudiante según el caso) deberá estar autorizado por el profesor. El puntaje se calcula como se mostró en el apartado anterior, en dos partes (medio término y ordianrio) del periodo que dura el curso; La calificación del PIA corresponde al 30% de la calificación total del curso. El desarrollo del trabajo PIA deberá mostrarse para su discusión en todas las clases.
|
Revise el reglamento de evaluaciones de la UANL: LINK
La evaluación de los aprendizajes: Enfoque en la educación a distancia ( Link )
Examenes se aplican en fecha oficial de escolar FIME.
Entrega de PE + PIA al final del curso |
|
|
PLAN DE TRABAJO
- El plan de trabajo por sesiones que a continuación se muestra se irá depurando y detallando conforme transcurra el tiempo.
-
Las actividades deberán entregarse por medio de la plataforma NEXUS hasta la fecha límite programada en el sistema; así como también al final del curso en su portafolio de evidencias 100%. Cada estudiante deberá entregar su portafolio en forma digital de manera individual. Evidencia de copia invalida a los portafolios involucrados. El nombre del archivo pdf del portafolio de evidencias deberá ser la matrícula del estudiante.
-
Para poder acreditar una calificación, el estudiante deberá entregar de forma digital su Portafolio de Evidencias 100%. El portafolio de evidencias es un documento pdf con separadores virtuales (bookmark) para cada actividad. El nombre del archivo pdf del portafolio de evidencias deberá ser la matrícula del estudiante; ejemplo: 1724407.PDF
-
Para poder acreditar una calificación, el estudiante deberá entregar de forma digital su Producto Integrador de Aprendizaje. El reporte del Producto Integrador de Aprendizaje consta de UN documentoPDF que acredita de manera individual a los estudiantes del equipo (si fuese el caso) por medio de una portada que especifique a los estudiantes involucrados.
-
Los exámenes de medio curso y final se presentarán de manera programada por medio de la plataforma NEXUS. No habrá oportunidad de reprogramar fecha de examen, por lo que se recomienda revisar el calendario del plan de trabajo; quien no presente acredita NP (cero) .
-
Las sesiones de MicroSoft Teams en línea son opcionales para los estudiantes y no serán grabadas ni retransmitidas. Los estudiantes deberán participar en clase, por lo que su conexción deberá incluir cámara, micrófono y la posibilidad de compartir las aplicaciones de computadora necesarias para la clase. Quien desee participar en las clases en línea, deberá estar en minuta del departamento de escolar de FIME así como también registrarse y comprobar su registro en el grupo MS-Teams de clase.
|
Calendario 2026 (PDF) |
|
Direcciones de internet de utilidad
en la asignatura
|
Manual de programación del robot del laboratorio (pdf)
Lenguajes de programación de robots industriales (pdf)
Manual del usuario del robot del laboratorio (pdf)
Guía rápida del robot del laboratorio (pdf)
Manual del robot KUKA (pdf)
Estudio y modelamiento del robot KUKA KR 6 (pdf)
Simulador KUKA (link)
How to build a station in RoboDK (link)
Modelo 3D SolidWorks del Scorbot (rar)
Formaciones Online de KUKA (Link) |
.
|
|
Fichas bibliográficas adicionales
a las del programa de clase
|
- ASADA&SLOTINE. Robot Analysis and Control .
John Wiley, 1986. ISBN 0-471-83029-1 . Localización UANL: TJ211 .A8.
- ANIBAL OLLERO BATURONE. Robótica Manipuladores y Robots Móviles.
Alfa, 2001. ISBN 84-267-1313-0 . Localización UANL: TJ211.415 .O5.
- YORAM KOREN. Robotics for Engineers.
Mc.Graw Hill, 1987. ISBN 0-07-035399-9
- WOLFRAM STADLER. Analytical Robotics & Mechanics.
Mc.Graw Hill, 1995. ISBN 0-07-060608-0 .
- LORENZO SCIAVICCO/ BRUNO SICILIANO. Modeling and Control of Manupulators.
Mc.Graw Hill, 1996. ISBN 0-07-057217-8 .
- K.S.FU, R.C. GONZÁLEZ, C.S.G. LEE. Robótica. Control, detección, visión e inteligencia.
Mc.Graw Hill. UANL: TJ211 .F8.
- JUAN PABLO SÁNCHEZ Y BELTRÁN. SISTEMAS EXPERTOS. Una metodología de Programación.
MACROBIT. UANL: QA76.M5 S36.
- JOSÉ SANTOS REYES y RICHARD J. DURO. Evolución artificial y robótica autónoma.
Alfaomega Ra-Ma. UANL: TJ211.37 .S3 2005..
- ANÍBAL OLLERO BATURONE. Robótica. Manipuladores y robots móviles. Editorial
Marcombo. UANL: TJ211.415 .O5.
- 10. MIKELL P. GROOVER, MITCHELL WEISS, ROGER N. NAGEL, NICHOLAS G. ODREY. Robótica industrial, tecnología, programación y aplicaciones.
Mc.Graw-Hill. UANL: TS191.8 R6.
- Computer
Graphics, Principles and Practice. Foley, van Dam, Feiner, Hughes.
Addison Wesley ISBN 0-201-84840-6
- Geometría
para la informática gráfica y CAD. Joan Trias Pairó.
Alfaomega ISBN 970-15-0978-1
- Mastering
CAD/CAM. Ibrahim Zeid.
McGraw-Hill International Edition. ISBN 007-123933-2
|
|
| FECHA |
TEMA |
MATERIAL ONLINE
(Complemento de clase asíncrona) |
SESIÓN Asíncrona
(Requisito su registro en grupo Nexus) |
ACTIVIDAD DEL ESTUDIANTE
(Se detallarán oportunamente como asignación en NEXUS) |
(01)
13/ene/2026 |
Introducción al curso, logística y encuadre. Robótica en FIME para los ingenieros en mecatrónica. |
- Calendario UANL (URL)
- Programa de clase Mecatrónica (pdf)
- Programa de clase Mecatrónica (pdf)
|
Bienvenida al curso ( Link) |
01) Ensayo
Haga un reporte en archivo PDF que incluya el programa de la clase con un ensayo corto (una cuartilla) de sus expectativas de este curso para reforzar sus actividades académicas y profesionales. |
(02)
20/ene/2026 |
Definición de robot y sus diferencias con respecto a otras máquinas.
Características particulares de los robots. Partes que componen un robot industrial.
Aplicaciones de los robots industriales.
Sistemas de n dimensiones y grados de libertad en máquinas. Nomenclatura y estándares de norma. |
|
|
02) Incluir en su portafolio de evidencias:
- El programa de la clase
- Material OnLine de esta fila
- Capturas de pantalla del software instalado y funcionando (versión completa o de evaluación) en su computadora de trabajo:
- MathCad R14
- RoKiSim 1.7
- Solidworks 2016
- Rhinoceros
|
(03)
27/ene/2026 |
Transformaciones geométricas:
- Introducción
- Traslación
- Escalamiento
Movimientos rígidos y transformaciones homogéneas. Composición de transformaciones homogéneas.
|
- @Tema 3 - Transformaciones 2D.pdf
- El mundo 2D.pdf
- Transformaciones y proyecciones.pdf
|
|
03) Incluir en su portafolio de evidencias:
- El material de clase OnLine de esta fila
- Utilizar el ejercicio "Rotaciones 3D" (pág 1,2,3) usando como punto P su matrícula de la sig manera
ej. mat 1581696 P=(96, 16, 158)
|
(04)
03/feb/2026 |
Matrices homogéneas.
Sistemas de ejes
La transformación geométrica de rotación.
Cinemática directa de posición. Definición y método.
Cinemática directa de posición. Ejercicio 2D y 3D. |
- Ejercicio "Rotaciones 3D"
- TCP del robot 2D "Rotaciones 3D" pag4
- Diseño y construcción de un brazo digitalizador como máquina de coordenadas manual para la captura de objetos 3D (PDF)
- Robot SCARA (URL)
|
|
04) Reporte de la solución del TCP del robot de la pagina 4 del (URL).
En donde
L=(5.83, 4.24)
dada la matrícula 1581714, Theta=(17,14) grados
|
(05)
10/feb/2026 |
Cinemática directa de posición. Ejercicio 3D con robot SCARA de Solidworks.
Cinemática inversa vs Cinemática directa
Solución geométrica cinemática inversa. Ejercicio 3D con robot SCARA de Solidworks. |
- Diseño de una interfaz para la producción de fisiogramas en el espacio R3 de un robot (PDF)
- Artículo Evaluación de características dimensionales y de color de piezas producidas en prototipos rápidos.
- Artículo Diseño y construcción de un brazo digitalizador para la captura de geometrías.
- Video1 FaroArm Move Device Position.
- Video2 Faro Gage - Personal Coordinate Measuring Machine. Model: F04 R26.8
- Video1 Arquitectura de robots con SolidWorks.
- Video2 Cinemática directa por medio de transformaciones geométricas.
- Análisis de la cadena cinemática de un robot SCARA RS40. SCARA con SolidWorks & MathCAD r14
- Cinemáticas (Video)
- Singularidades (Video)
- Manipulator Singularities (Video)
- Cinemática inversa 3D de un robot IRB120 en RoKiSim (Video)
|
Link en estructura Nexus
Link en estructura Nexus
|
05) Hacer el ejercicio con el robot SCARA (URL) poniendo los valores angulares de posición según su matrícula:
ej. mat. 1578029 L3=157 Theta=(29, 80) |
(06)
17/feb/2026 |
Interpolación y ajuste a
curvas.
Puntos y posiciones. |
- Video1 Qualify Reports
- Video2 Fit points to Sphere
- Laboratorio virtual Análisis de la cadena cinemática de un robot SCARA RS40.
- Artículo Diseño de una interfaz para la producción de fisiogramas en el espacio R3 de un robot.
|
|
|
| 24/feb/2026 |
EXAMEN ESCRITO DE MEDIO TÉRMINO |
EXAMEN ESCRITO DE MEDIO TÉRMINO |
EXAMEN ESCRITO DE MEDIO TÉRMINO |
Unidades (02) - (06) |
(07)
03/mar/2026 |
Exposición de entregables de medio término por equipos de PIAs |
EXPOSICIÓN DE PIAs
-
Cada estudiante expone 20 minutos.
-
Al término de la exposición habrá una sesión de 30 min de preguntas y respuestas.
-
Si aplica, las preguntas del público serán respondidas por cualquier integrante del equipo expositor.
|
N/A |
Exposición de entregables de medio término por equipos de PIAs |
(08)
10/mar/2026 |
Interpolación y ajuste a
curvas.
Interpolación lineal. El segmento de recta 3D. |
- Video Tendencia lineal de un conjunto de puntos en Excel.
- Ajuste lineal (link)
|
|
08) Para la posición TCP dada por la matrícula del estudiante en el robot SCARA de Solidworks, encontrar las dos soluciones de cinemática inversa (los valores {Theta} de cada eje).
Ejemplo: matrícula 1578029
TCPx=80, TCPy=(100+15)=115, TCPz=29 |
(09)
17/mar/2026 |
Cambio de base. Funciones 3D.
|
|
|
09) Hacer un reporte de una trayectoria lineal de un robot propuesto de RoKiSim. El reporte debe incluir:
- Archivo de Word, MathCAD, Rhino, Solidworks y archivos de simulación RoKiSim.
- Análisis de cinemática inversa para los puntos
Pini=(seleccionar un punto)
Qfin=(seleccionar un punto)
- La ecuación del movimiento.
- Valores XYZ de tres puntos equidistantes intermedios interpolados en la trayectoria.
|
(10)
24/mar/2026 |
Interpolación circular y arcos. |
|
|
10) Hacer un reporte utilizando RoKiSim de un robot realizando la trayectoria circular. Se debe entregar el reporte, incluyendo:
- Archivo de Word, MathCAD , Rhino, Solidworks y los archivos de simulación RoKiSim.
- Análisis de cinemática inversa para los puntos
Pini=(seleccionar un punto)
Qmed=(seleccionar un punto)
Rfin=(seleccionar un punto)
La ecuación del movimiento.
- Valores XYZ de tres puntos equidistantes intermedios interpolados en la trayectoria.
|
(11)
14/abr/2026 |
Curvas de forma libre. Curvas de Bezier. |
|
|
11) Hacer un reporte utilizando RoKiSim de un robot realizando la trayectoria de Bezier para el polígono de control {P}. Se debe entregar el reporte, incluyendo:
- Archivo de Word, MathCAD , Rhino y Solidworks.
- Polígono de control {P}.
P0 = (selecionar un punto),
P1 = (seleccionar un punto),
P2 = (seleccionar un punto),
P3 = (seleccionar un punto)
- La ecuación del movimiento.
- Cinemática inversa de tres puntos equidistantes intermedios interpolados en la trayectoria.
|
(12)
21/abr/2026 |
Superficies de tensor |
Superficies de tensor con curvas de Bezier. Ejercicio. |
|
12) Hacer un reporte utilizando RoKiSim de un robot propuesto realizando la trayectoria racional de Bezier W=(1,50,50,1) para el polígono de control {P}. Se debe entregar el reporte, incluyendo:
- Archivo de Word, MathCAD , Rhino y Solidworks.
- Polígono de control {P}.
P0 = (selecionar un punto),
P1 = (selecionar un punto),
P2 = (selecionar un punto),
P3 = (selecionar un punto)
- La ecuación del movimiento.
- Cinemática inversa de tres puntos equidistantes intermedios interpolados en la trayectoria.
|
(13)
28/abr/2026 |
Exposición final por equipos de PIAs |
EXPOSICIÓN DE PIAs
-
Cada estudiante expone 20 minutos.
-
Al término de la exposición habrá una sesión de 30 min de preguntas y respuestas.
-
Si aplica, las preguntas del público serán respondidas por cualquier integrante del equipo expositor.
|
N/A |
Exposición final por equipos de PIAs
|
| 05/may/2026 |
EXAMEN ORDINARIO |
EXAMEN ORDINARIO |
EXAMEN ORDINARIO |
Unidades (08) - (12) |
| 05/may/2026 |
EXAMEN EXTRAORDINARIO |
EXAMEN EXTRAORDINARIO |
EXAMEN EXTRAORDINARIO |
Unidades (02) - (12) |